
 اگر این محصول را خریداری کنید،
اگر این محصول را خریداری کنید، توضیحات
دانلود کتاب و حل المسائل (حل تمرین) کتاب دینامیک مهندسی پیشرفته نوشته جری گینزبرگ – ویرایش 2
این کتاب در چارت درسی کارشناسی ارشد مهندسی مکانیک گرایش طراحی کاربردی و هوافضا، سازه و بدنه قرار دارد.
عنوان های فصول کتاب:
- ملاحظات اصلی
- سینماتیک ذرات
- حرکت نسبی
- سینماتیک اجسام صلب
- سینتیک نیوتونی جسم صلب
- مقذمه ای بر مکانیک تحلیلی
- مفاهیم بیشتر در مکانیک تحلیلی
- اثرات ژیروسکوپی
پیش درآمد دینامیک مهندسی پیشرفته:
All who model mechanical systems are aware of the unique demands such activity places on conceptual abilities. We must characterize the manner in which numerous individual components interact, and select the appropriate physical laws applicable to each. No one tells us which variables are important. In complicated situations, a multitude of approaches is likely to be available. Thus, an important aspect of training students in this area is developing a level of experience in identifying the salient aspects of a system. They must learn to identify the pathways by which the basic parameters characterizing the inputs may be connected to the desired information representing the solution. In other words, a basic hallmark of the study of engineering dynamics is problem-solving.
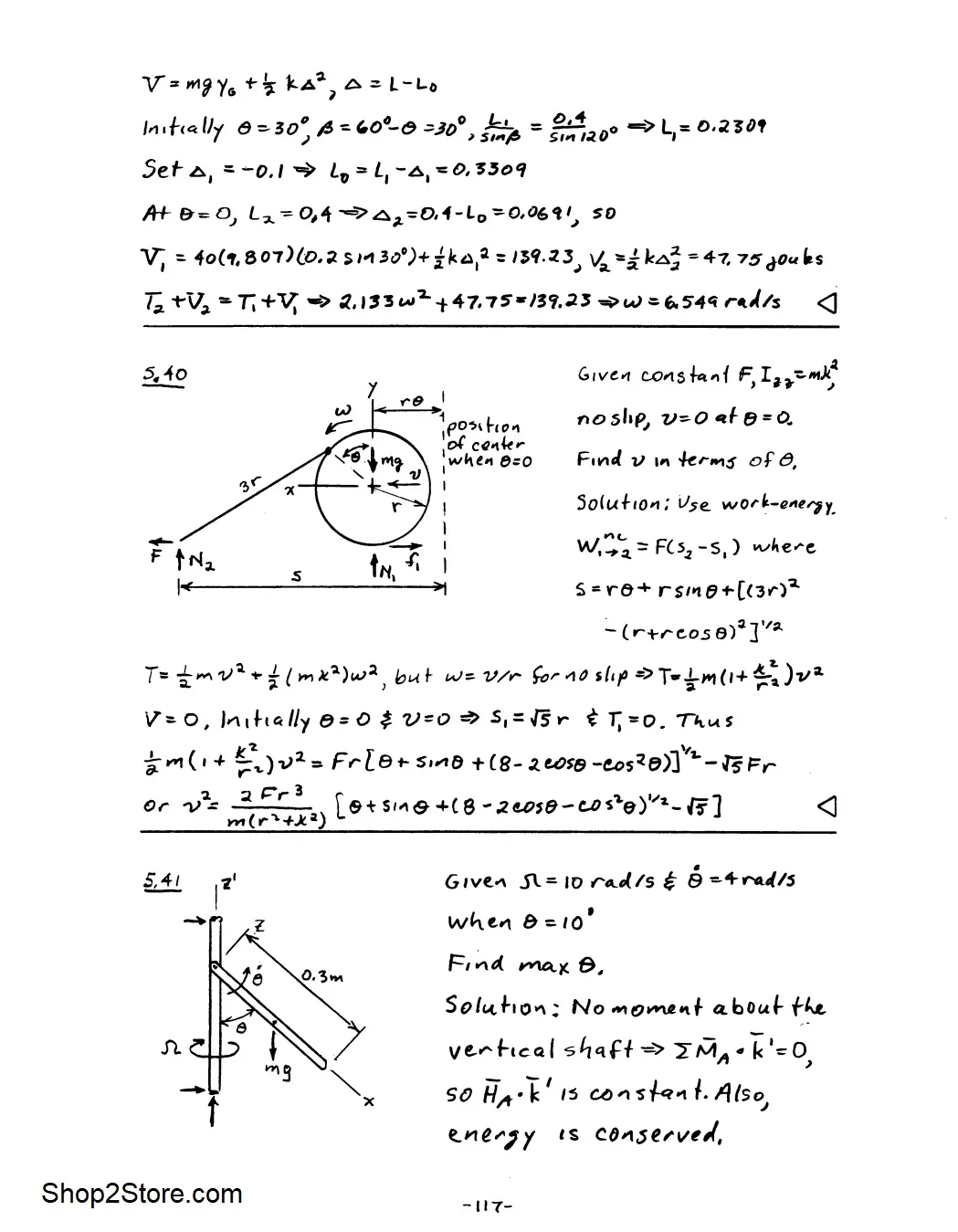
Some instructors believe that engineers learn by example. If that statement is true, it is only because an engineer is problem-oriented. One of the most prominent features of this textbook is its wealth of examples and homework problems. I have tried to select systems for this purpose that are recognizable as being relevant to engineering applications, yet sufficiently simplified to enable one to focus on the many facets entailed in implementing the associated theoretical concepts. One example of my approach may be found in the development of the method of Lagrangian multipliers. Some texts employ rather simple systems to illustrate this topic. In contrast, Example 3 in Chapter 7 employs Lagrangian multipliers to obtain the equations of motion for a rolling disk in arbitrary motion. In order to emphasize the continuity of the result with earlier work, this solution is then compared to the case of steady precession of a rolling disk, which is solved in Example 8 of Chapter 5 by using the Newton-Euler equations. The general equations of motion are then used in Examples 4 and 5 of Chapter 7 to illustrate the implementation of computational strategies for determining the response of nonlinear systems subject to kinematical constraints. I then use the solution to those equations as a basis for discussing the stabilizing effect of the gyroscopic moment in this situation. This approach is typical, as I often use the same system to highlight comparative features of different principles and approaches. The solutions for most examples are discussed in depth, along with qualitative discussions of the results.
Another feature that distinguishes engineering systems from the problems of classical physics is the importance of careful characterization of their kinematical features. It is in this area that some texts have their greatest shortcoming. In addition to being important as a self-contained task, a kinematical analysis provides the framework on which kinetics principles are constructed. For example, proficiency in kinematics is a prerequisite to selecting a suitable set of generalized coordinates for a complicated system. A large portion of the present work is devoted to a variety of topics in the kinematics of particles and rigid bodies. Particle motion is treated extensively in Chapter 2, from a variety of viewpoints. The fundamental principles for motion relative to a moving reference frame are developed in Chapter 3. That development begins with a thorough treatment of rotation transformations and their implications for the movements of points in a rotating body. Such a study helps the student to break the limits imposed by two-dimensional thinking and proves to be very useful as a general tool for representing motion variables and forces in three dimensions. The ability to formulate angular velocity and angular acceleration is crucial, yet many texts do not present a consistent methodology for such an evaluation. The development of this topic in Chapter 3 is drawn from the undergraduate text I coauthored with Dr. Joseph Genin.t Our experiences showed this approach to be readily accessible and highly versatile. A large part of the formulation of equations of motion using either Newtonian or Lagrangian concepts must be devoted to constraint equations, so much of Chapter 4 is devoted to applications involving interconnected systems, such as linkages, and to rolling systems.
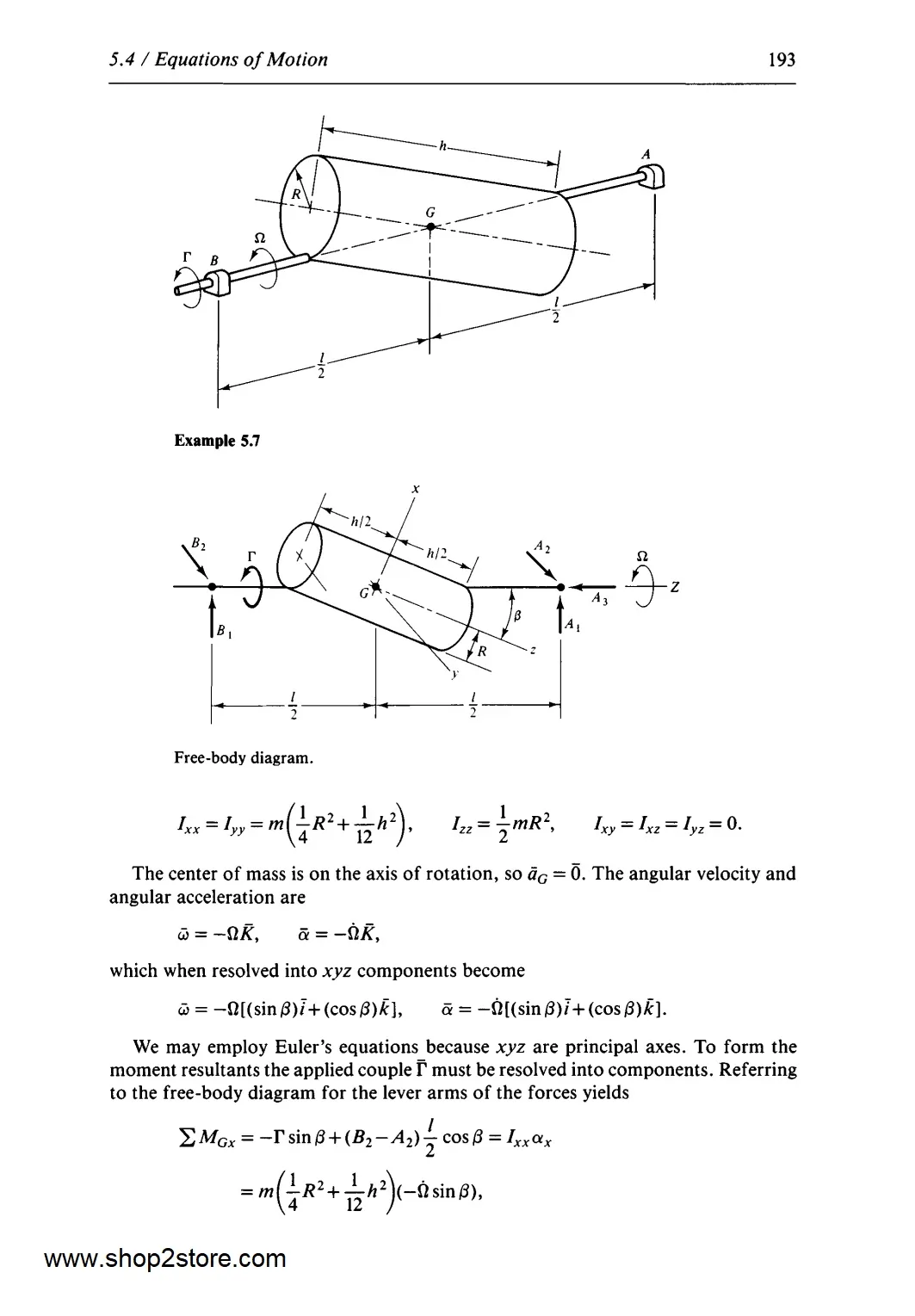
Most engineering students first learn the Newtonian approach to kinetics principles, and that is as it should be. In that way, the student comes to appreciate the relationship between the external force system, the constraint forces, and the changing linear and angular momenta. It is from such studies that most individuals develop physical insight. Chapter 5 is devoted to these topics for bodies in general spatial motion. I present a reasonably complete discussion of the evaluation of moments and products of inertia in this chapter, in order to balance the decreased attention that now seems to be devoted to such tasks in the typical undergraduate course. The emphasis of the kinetics analysis in this chapter is on the derivation of the translational and rotational equations of motion for a rigid body, using free-body diagrams as a fundamental modeling tool. I also discuss the application of conservation principles, but only in the context of their use as a simple way of solving differential equations of motion in special circumstances.
در صورت داشتن هرگونه سوال و یا مشکل در بخش پشتیبانی شاپ تو استور مطرح نمایید.









دیدگاهها (0)
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.